← prev
next →


行業(yè)經(jīng)驗(yàn)
榮譽(yù)資質(zhì)
分支機(jī)構(gòu)業(yè)務(wù)覆蓋全國
產(chǎn)品覆蓋能源/軍隊(duì)各個(gè)領(lǐng)域

吉林省泰華電子股份有限公司創(chuàng)始于2001年,注冊資金2240萬元,總部位于吉林長春,是一家專業(yè)從事公共安全領(lǐng)域研發(fā)、生產(chǎn)、銷售、施工于一體的省內(nèi)首批安防高新技術(shù)企業(yè),重點(diǎn)為客戶在雷電預(yù)警、雷電防護(hù)、防雷設(shè)施智能在線監(jiān)測及數(shù)據(jù)分析、城市防災(zāi)減災(zāi)應(yīng)急管理、電磁屏蔽、安防系統(tǒng)及弱電系統(tǒng)智能化工程等方向...



防雷設(shè)施在線安全監(jiān)測系統(tǒng)
防雷設(shè)施在線安全監(jiān)測系統(tǒng)是我公司多年來致力于“雷電防護(hù)監(jiān)測儀”的 又一高新技術(shù)產(chǎn)品
短波天線共用器
KS-TX-50/8L 短波偵收天線共用器是一種低噪聲、低失真的寬頻帶共用器。
等離子阻雷裝置
等離子阻雷裝置是我公司研發(fā)的新一代空間電荷放電型阻雷裝置。
KS系列電源濾波器
KS系列電源濾波器又稱輸入濾波器、進(jìn)線濾波器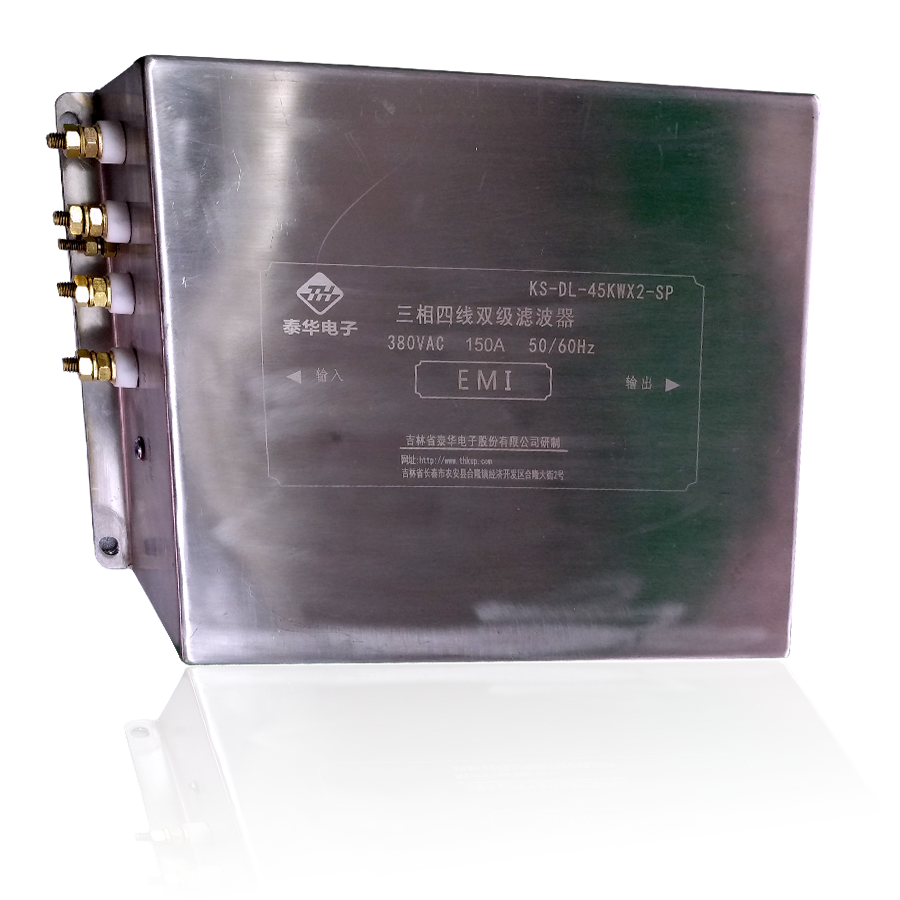
電源智能管理裝置
? ? ? 此產(chǎn)品是基于集成用電安全管理,智能控制、智能顯示、智能上報(bào)微電子一體化的技術(shù)優(yōu)勢.





1月31日,“擔(dān)使命 闖新途 聚眾志 開新局”2024集團(tuán)年會盛典在海鮮碼頭酒店盛大舉行。長春市赤峰...

1月19日,吉林省無人機(jī)產(chǎn)業(yè)協(xié)會第一屆第二次會員大會暨低空經(jīng)濟(jì)發(fā)展研討會議在省賓館舉行。會議總結(jié)協(xié)會...

2023年10月12日,原北部戰(zhàn)區(qū)副參謀長安衛(wèi)平、原海軍南海艦隊(duì)副參謀長李曉巖、原吉林鐵路檢察院檢察...

8月24日,云南省氣象局在昆明市西山區(qū)團(tuán)結(jié)鄉(xiāng)硯...

為提高防雷檢測企業(yè)的業(yè)務(wù)水平和能力,進(jìn)一步規(guī)范防雷服務(wù)市場...

為切實(shí)加強(qiáng)河池市轄區(qū)內(nèi)旅游景區(qū)景點(diǎn)防雷安全及災(zāi)害性天氣過程...
服務(wù)咨詢:0431-85803767
售后支持:0431-85803767
郵編:130000
地址:長春市高新北區(qū)盛北大街3333號北湖科技園B11棟